2.5 Degrees Freedom Emech Project
*
2.5 Degrees Freedom Emech Project *
2.5 Degrees of Freedom
For this project, my group designed and built a 2.5 DOF Cartesian motion system for ME 360 Electromechanical Design. The goal was to create a machine that could move in the x and y directions and also raise or lower a writing tool. After discussing different ideas, we decided to make the system play tic-tac-toe because it required controlled movement, repeatable positioning, and simple decision-making.
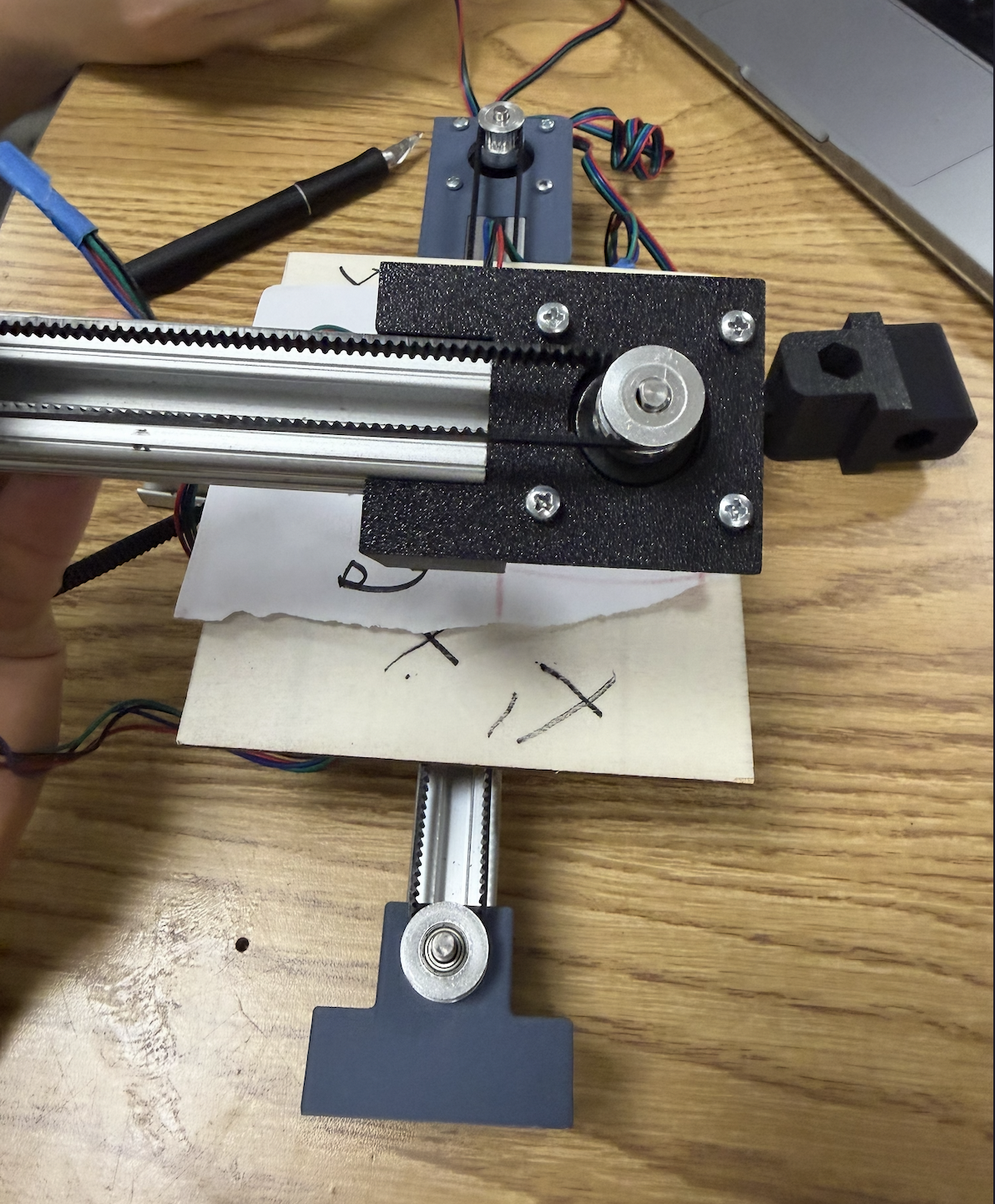
The mechanical system was built using 80/20 aluminum extrusion, linear stages, motor mounts, belts, and a custom pen holder. The motors moved the carriage across the frame, while the pen mechanism allowed the system to write on the playing surface. We also designed and adjusted several parts so the pen could stay aligned and make consistent contact with the board without applying too much force.
A major part of the project was making sure the system moved accurately to each square of the tic-tac-toe grid. We had to test different motor movements, adjust the pen height, and make small changes to the frame and holder so the machine could write clearly. Even small alignment errors caused the pen to miss the correct location, so a lot of the project involved trial and error.
For the programming side, we used Python through Jupyter Lab to control the motion of the system. The program took the player’s move, tracked the current board state, and then chose the system’s next move. Instead of just following a fixed set of motions, the code had to respond differently depending on how the game was being played. This made the project more interesting because the mechanical design and the programming had to work together.
One of the biggest challenges was getting the physical system to behave consistently. The motor motion, belt tension, pen pressure, and alignment all affected the final result. The system worked in concept, but small mechanical issues made it difficult to get perfect writing every time. Through testing, we learned how important it is to consider tolerances, repeatability, and calibration when designing an electromechanical system.
Overall, this project gave me hands-on experience with mechanical design, motion control, programming, and system integration. It showed me that building a working machine is not just about designing the parts separately, but also about making sure the mechanical, electrical, and software components all work together as one system.

For the programming side of the project, we used Python to control the movement of the tic-tac-toe system. The code assigned each box on the 1–9 grid to a specific coordinate, allowing the machine to move to the correct position based on the player’s input. The program also tracked the moves made by both the player and the system, allowing it to respond with its next move instead of following a fixed motion path.
Once the system chose a move, the machine would travel to the matching coordinate, lower the writing tool, draw the correct shape, and then lift the tool back up to avoid dragging or making extra marks on the board. We used different shapes for the player and the system so each move could be clearly identified during the game.
The most difficult part was not only writing the code, but getting the code to match the physical motion of the machine. Each square on the board had to be tested multiple times because small changes in motor rotation, belt movement, and pen height affected where the mark appeared. After several rounds of trial and error, we adjusted the coordinates and pen engagement to enable the machine to play the game more consistently.