Simulation
*
Simulation *
Motor Speed Control
In this project, I designed and simulated a motorized platform that transports a one-foot vertical 8020 aluminum bar forward and backward over a distance of 5-12 feet without allowing the bar to tip over. The goal was to minimize travel time while keeping the unsupported load dynamically stable during motion.
To determine the stability limits, I first created a dynamic model in SolidWorks. The aluminum bar was treated as a rigid body that only contacted the platform at its base, meaning no side supports or fasteners were used. The cart itself was constrained to move along a single horizontal axis using slider mates, and a linear motor was applied so that the acceleration of the platform could be easily controlled.
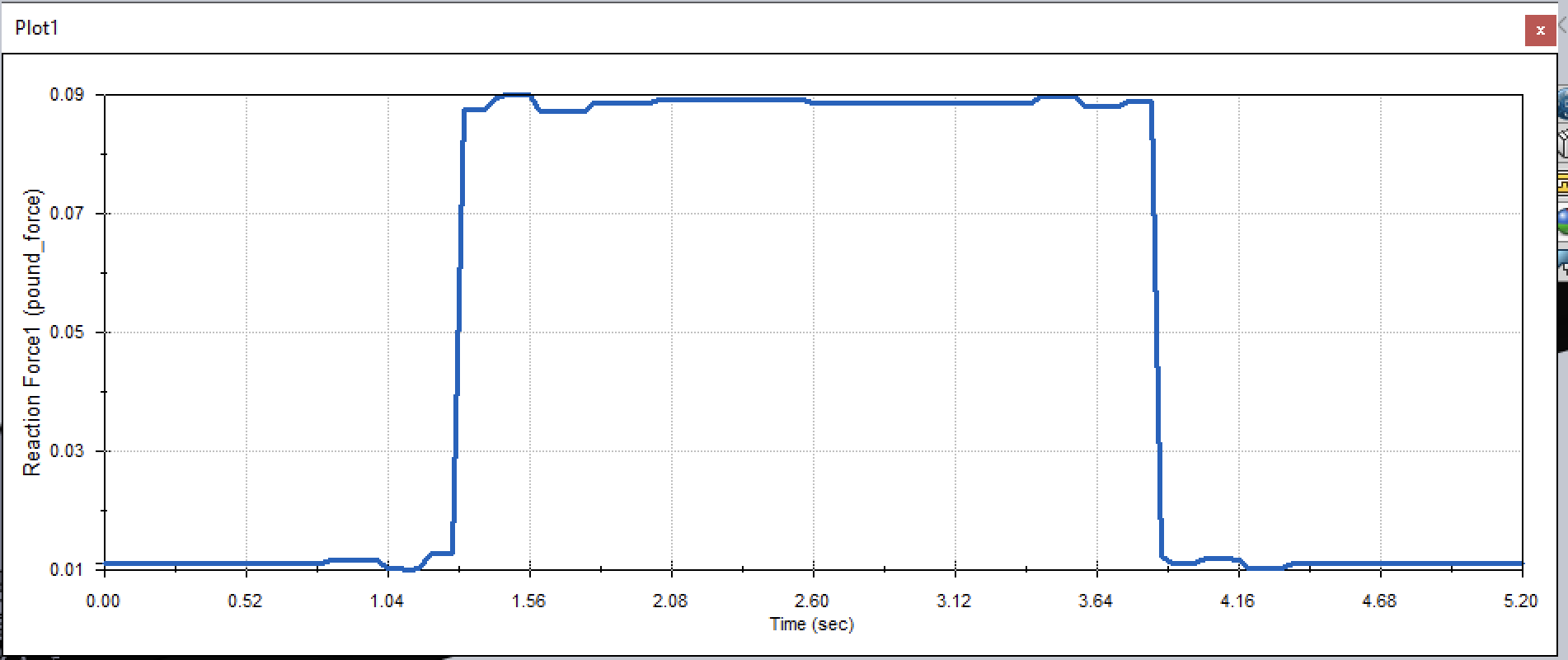
Using the Motion Study tools in SolidWorks, I monitored the reaction forces acting on the bar as the platform accelerated. This result helped establish the maximum allowable acceleration and guided the design of the wheel and bracket components for the next stage of the project.
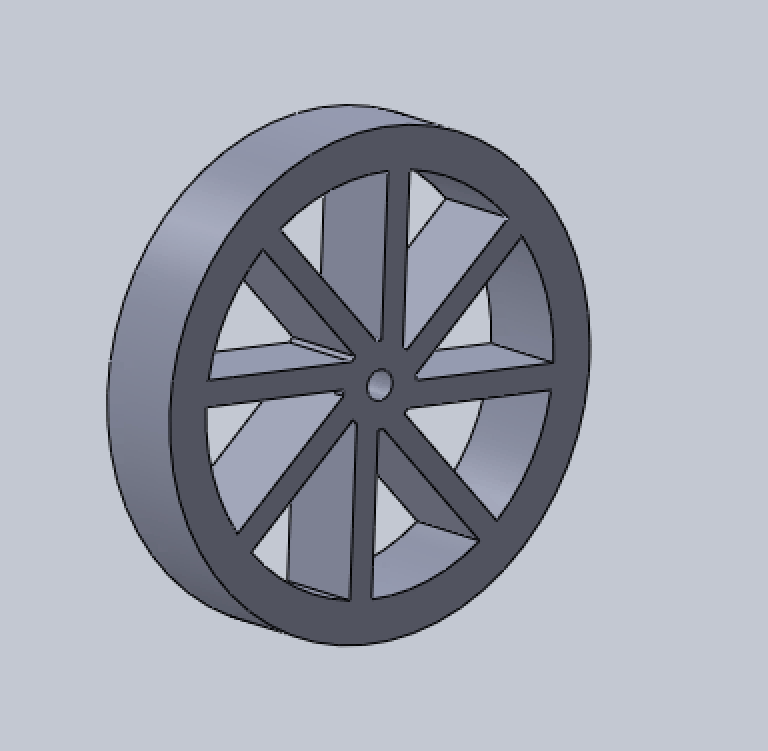
Throughout the course, we also worked with Arduino-based motor control systems. These labs introduced embedded programming, sensors, and feedback control strategies such as bang-bang control and model predictive control. We learned how to connect an Arduino to a motor driver and encoder, which were later used in the final cart design. Using the acceleration limits from the simulation, I assembled the physical platform. The wheels were 3D printed in PLA, while the chassis and brackets were laser cut from MDF. The components were then assembled using wood glue and fasteners.
In the SolidWorks model, a rotary motor was connected to the drive wheel through a gear reduction system, and frictional contact was defined between the wheel and the ground to prevent unrealistic slipping. A Grumbler mobility analysis was performed beforehand to confirm that the system had one degree of freedom in translation.
Reaction forces were measured at the wheel axles and at the contact point between the bar and the platform using force sensors in the simulation. These forces were used to compare the restoring moment from gravity with the overturning inertial moment during acceleration. The analytical stability condition was derived by equating these two torques, and the simulation results were checked against this theoretical tipping threshold.